Verity 使 AEC 團隊能夠大規模產生準確的品質評估。自動識別 Autodesk Navisworks® 或 Revit® 模型與竣工點雲資料之間的偏差,以驗證已安裝工作的位置或驗證模型的品質。簡化 QA/QC 流程,增強衝突偵測工作流程,並確保最終施工符合預期設計,從而減少返工、進度超支和整體專案風險。
- 檢查 100% 的已安裝工作
- 減少昂貴的返工
- 消除行程延誤
- 交付準確的竣工圖
Verity 如何幫助您的項目
大規模獲得準確的品質評估
輕鬆將竣工點雲端資料與您的設計和協調模型進行比較,以快速且準確地識別從單一元素到整個工作範圍的安裝或建模錯誤。與傳統方法相比,只需一小部分時間即可獲得更詳細、更可行的分析
更深入了解您的項目
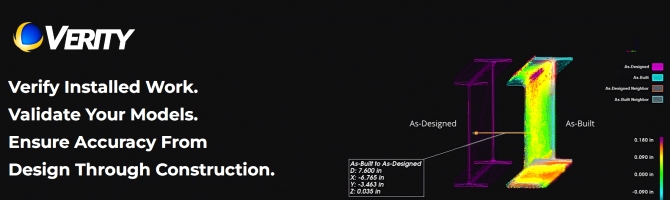
可自訂的熱圖和顏色編碼報告直觀地顯示偏差、彎曲和偏轉。精確的測量工具為您提供有關安裝的元件如何偏離模型或模型如何偏離現實條件的定量數據。找出問題並揭示該領域的真實情況。
輕鬆更新您的模型以反映竣工現實
只需點擊幾下即可更新您的 Autodesk Navisworks® 或 Revit® 模型,以反映竣工或現有條件。 使用竣工幾何輕鬆記錄現實與模型之間的偏差。 基於高精度點雲數據,確保可施工性並促進順暢的協調和衝突偵測工作流程
讓專案利害關係人了解情況
Verity 提供各種強大的報告選項。在 Verity 中本地建立詳細的 HTML 或 PDF 報告,或使用 Revit 的文件功能 透過 Verity 分析建立行業標準的可交付成果。
Revit集成
Verity 的 Revit 整合使建築師和承包商能夠確保建築專案的品質並降低風險。自動將高精度竣工點雲資料與 Revit® 模型進行比較,以檢查安裝品質或根據現有條件驗證設計模型。輕鬆建立準確的竣工模型,並利用 Revit® 強大的文件功能來建立圖紙和明細表,所有這些都基於您的 Verity 分析
最適合:
– 正在驗證已安裝工程
– 正在驗證設計模型
– 創造竣工幾何
– 產生文件
驗證已安裝的工作
產生熱圖和顏色編碼報告,以快速識別偏差、彎曲或偏轉。提供安裝工作的完整記錄,並取得超出指定公差的任何偏差的詳細測量結果。
驗證您的設計模型
Verity 的 Revit 整合使模型/點雲比較成為雙向途徑。使用 Verity 的 QA/QC 工具確保您的設計模型符合現有條件,或確保您的模型真正「竣工」。
自動建立竣工幾何圖形
自動建立超出公差圖元的竣工副本,您可以輕鬆地將 Revit 系列物件與其進行比較或捕捉。
產生詳細文檔
執行 QA/QC 分析,然後將屬性推送到 Revit 以建立標記的圖紙和明細表,其中包含項目上下文中顯示的偏差和安裝錯誤,以便精確定位和修復現場問題。
Navisworks 集成
Verity 的 Navisworks® 整合透過自動將竣工點雲資料與 Autodesk Navisworks® 協調模型進行比較,使承包商能夠確保其施工專案的品質並降低風險。使用 Verity 的高級 QA/QC 工具驗證 100% 的已安裝工作,並提供已安裝工作的完整記錄。產生超出指定容差的任何偏差的詳細測量結果。更新協調模型以反映竣工條件,然後執行衝突檢測以確保安裝偏差不會影響下游工作。
最適合:
– 正在驗證已安裝工程
– 更新模型至竣工位置
– 碰撞偵測& 協調
– 進步追蹤
驗證已安裝的工作
產生熱圖和顏色編碼報告,以快速識別偏差、彎曲或偏轉。提供安裝工作的完整記錄,並取得超出指定公差的任何偏差的詳細測量結果。
自動建立真實的竣工模型
只需單擊一下,即可更新 Navisworks 中的協調模型以反映現實條件。
碰撞檢測您的竣工作品
只需執行現有的衝突偵測工作流程,即可獲得安裝錯誤如何導致與下游工作發生衝突的新見解。
充滿信心地追蹤進度
使用現實擷取資料監控施工進度。確保專案每個階段的及時完成並維持品質標準。
System Requirements
This article covers various minimum and recommended system specifications and additional helpful information for optimizing a processing machine for Verity.
Getting Started
This article will cover system requirements for running Verity. Maintaining at least minimum system requirements for the latest AutoDesk software is a good rule of thumb to run Verity effectively. System Recommendations are difficult to provide considering the wide range of project sizes and complexity. Please note that the Minimum and Recommended Specifications that are provided in this article are targeted towards smaller projects (less than 40 scan locations). If you have a project larger than this please consider upgrading from the given recommendations. If you are dealing with extremely large projects consider your budget vs the Large Project Specifications provided below.
Recommended Specifications
OS – Microsoft Windows 11, 10 including Enterprise, Ultimate, Professional, or Home Premium editions.
CPU – 8+ core processor
RAM – 16+ GB RAM
GPU – 2+ GB of VRAM
Hard Drive – SATA Solid State Drive with at least 400/400MBps Read/Write speeds but preferably an NVME Solid State Drive with at least 1000/1000MBps Read/Write speeds.
Minimum Specifications
OS – Microsoft Windows 11, 10, 8, 7 including Enterprise, Ultimate, Professional, or Home Premium editions.
CPU – 64-bit, dual-core processor
RAM – 8 GB RAM
GPU – At least 1 GB of VRAM
Hard Drive – 7200RPM HDD (while this hard drive will technically work, it will be incredibly slow due to the size and density of point cloud data. It is highly recommended to use a solid state drive in place of a mechanical hard drive).
Large Project Specifications
OS – Microsoft Windows 11, 10, 8, 7 including Enterprise, Ultimate, Professional, or Home Premium editions.
CPU - 16+ core processor
RAM - 64+ GB RAM
GPU - 12+ GB VRAM
Hard Drive - NVME M.2 Solid State Drive with 3000/3000MBps Read/Write speeds.
Network License Server Requirements
Server - The computation is done client side, while the server hosts the license. The server can be running most operating systems, including most Linux Distros, short of OS X.
Client - The requirements for clients are all based on expected data and budget, save being able to connect to the host device by TCP/UDP, either by LAN or VPN.
Verity Hardware Usage Explained
Verity has two separate processes that rely on various hardware of the processing machine. When Adding point cloud data or elements to Verity, or running an Analysis, the CPU and hard drive are the most used.
Verity will attempt to run a Pointsloader.exe per thread of the CPU until it exceeds the max read/write speed of the hard drive where the data is located. If the processing machine has 24 threads on the CPU but a slow hard drive, the hard drive will be the bottleneck. If the processing machine has 4 threads on the CPU but a state-of-the-art NVME solid state drive, then the CPU will be the bottleneck.
RAM will only become a limitation on very large projects but is usually bottlenecked first by the CPU or Hard Drive. For most projects, if a processing machine has at least 32 GB RAM this should almost never be an issue. If most projects are incredibly large (100GB+ of point cloud data) it might be worth investing in more RAM as a safeguard.
Once Add to Verity and Analyze are finished, the CPU and Hard Drive are hardly used anymore by Verity. The main focus for the processing machine will then be rendering. However, the Host rendering will always be more intensive than Verity rendering. If you are able to render point data and geometry sufficiently in your Host software, Verity will have no issues with rendering.
EdgeWise
EdgeWise is an as-built modeling platform that uses advanced algorithms to automate tedious scan-to-BIM workflows. It models as-built pipes, structural elements, ducts, walls, conduit, and cable trays from mobile and terrestrial point clouds significantly faster than traditional manual modeling techniques—all while improving the accuracy of the model.
Rithm
Rithm for Navisworks analyzes laser scan data of wet or dry concrete to perform automatic FF/FL analysis and generates industry-compliant reports in minutes. It offers near real-time insight on flooring, wall, and beam deviations so projects stay on schedule.